0交流步进减速器
电动机保护器的常见类型热继电器:普通小容量交流电机,良好工作条件,不存在频繁启动等恶劣工况,由于精度差,可靠性不能保证,不使用。电子型:检测三相电流值,整定电流值采用电位器旋钮或拔码关操作,电路一般采用模拟式,采用反时限或定时限工作特性。保护功能包括过载、缺相、堵转等故障保护,故障类型采用指示灯显示,运行电量采用数码管显示。智能型:检测三相电流值,保护器使用单片机,实现电动机智能化综合保护,集保护、测量、通讯、显示为一体。
机械减速机装置能分别起以下作用:
1、改变动力机的输出速度(减速、增速或变速),以适合工作机构的工作需要;
2、改变动力机输出的转矩,以满足工作机构的要求;
3、把动力机输出的运动形式转变为工作机构所需的运动形式〔如将旋转运动改变为直线运动,或反之)。
4、将一个动力机的机械能传送到数个工作机构,或将数个动力机的机械能传递到一个工作机构。
5、其他的特殊作用,如有利于机器的装配、、维护和安全等而采用机械减速机装置。减速机是一种相对精密的机械,使用它的目的是降低转速,增加转矩。它的种类繁多,型号各异,不同种类有不同的用途分类。
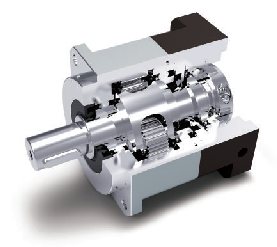
行星减速机星形齿轮构造受力性解析
显式动力学有限元理论显式有限元算法的控制方程描述如下。
显式有限元程序采用Lagrange描述增量法,其相关方程如下
1)动量方程ij+fi=xi(1)式中,ij为柯西应力;为密度;fi为单位质量体积力;xi为加速度。
2)能量方程为E=Vsijij-(p+g)V(2)式中,V为现时构形体积;ij为应变率张量;q为体积黏性阻力;sij、p分别为偏应力与压力,sij=ij+(p+g)ij,p=-13ijij-q.
3)质量守恒方程为=J0(3)式中,J为雅可比行列式;0为初始质量密度。
4)其边界条件中面力边界条件情况如下ijni=ti(t)在S1面力边界上式中,ni(i=1,2,3)为现时构形边界S1的外法线方向余弦;ti(i=1,2,3)为面力载荷。位移边界条件xi(Xj,t)=Di(t)在S2上的边界条件式中,Xj(j=1,2,3)为初始位移;Di(t)(i=1,2,3)为给移函数。
滑动接触面间断处的跳跃条件为(+ij-ij)nj=0,当x+i=x-i接触时沿接触边界S0。行星减速机行星齿轮参数及材料属性行星齿轮结构各个齿轮的参数设置为:模数为4,压力角为20,齿宽为50mm,太阳轮、行星轮、内齿圈的齿数分别为:21、24、69.其中太阳轮行星轮的材料为Cr-Ni-Mo合金钢,其内齿圈采用42CrMo合金钢。
前面我们对步进电机与伺服电机之间的区别已经了一些分析,也知道它们之间已经有六点不同的分析,其实步进电机与伺服电机在控制方式上同样也存在着区别,步进电机的控制方式是环控制,而伺服电机采取的控制方式则是闭环控制。
那么为什么步进电机和伺服电机会在控制方式有区别呢?原因是:
步进电机:当步进电机始真正工作时,步进驱动器会接收到一个脉冲信号,它就驱动步进电机所设定的方向进行转动到一个固定的角度。那么我们是可以通过控制脉冲的个数来进行控制角位的移量的,同时还可以通过对控制脉冲频率进行控制电机转动的速度和加速度,也因为这样才证实了步进电机的控制方式是:环控制。
+
0T1
160Z 0T2
160Z 0T3
160Z

