三道河乡传动装置伊明牌ALF115-L1-10-K5-19低惯量行星减速器
发布时间:2024-04-26 16:28:35
发布用户:ymcdkj
-K5-19低惯量行星减速器
该机分卧式、立式、双轴型和直联型等装式,是冶金、矿山、建筑、化工、纺织、轻工业等行业的设备。摆线针轮减速机的主要特点减速比大,效率高: 传动减速比为9 合可达数万,且针齿啮合系套式滚动摩擦,啮合表面无相对滑动,故 减率达94%。运转平稳,噪音低:在运转中同时接触的齿对数多,重合度大,运转平稳,过载能力强,振动和噪音低,各种规格的机型噪音小。
三道河乡传动 低惯量行星减速器
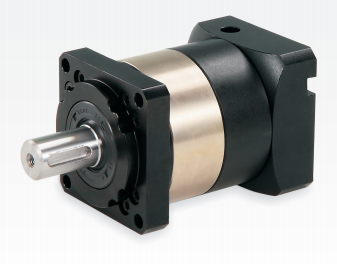
众所周知,一台机器通常是由三个基本部分组成:即动力机、行星减速机和工作机构。有时根据机器工作需要,可能还有控制系统和润滑、照明等辅助系统。行星减速机是指将动力机产生的机械能以机械的方式传送到工作机构上去的中间装置。
行星减速机在其中起到的作用是,降速同时提高输出扭矩,扭矩输出比例按电机输出乘减速比,但要注意不能超出行星减速机额定扭矩。另外,减速还降低了负载的惯量,惯量的减少为减速比的平方,其实大家都可以看一下,一般电机都会有一个惯量数值的。
三道河 -19低惯量行星减速器
PMSM需要正弦波电流,而BLDCM需要矩形波电流,导致了反馈元件的不同。BLDCM中,每一时刻只有两相绕组导通,每相导通120°电角度,电流每60°电角度换相一次,只要正确检测出这些换相点,就能保证电机正常运行,在空间机电系统中 常见的位置传感器是霍尔位置关。在PMSM中,需要正弦波电流,电流幅值由转子瞬时位置决定,电机工作时所有三相绕组同时导通,需要连续的位置传感器,在速度伺服系统中仍需连续位置传感器,空间机电系统中 常见的位置传感器有旋转变压器+RDC解码模块、光电编码器和同步感应器+RDC解码模块。BLDCM构成的速度伺服系统中,只需要一个低分辨率的传感器,从这一点看,如果换相引起的转矩波动可以接受,BLDCM比PMSM更适合于速度伺服系统,而在位置伺服系统中,由于需要位置传感器,BLDCM与PMSM相比没有优势。 对于电机电流传感器,BLDCM和PMSM伺服系统一般只需要两个电流传感器测量两个绕组电流,第三个绕组电流可以由两个电流测量值推算出来。 常见的电流传感器是霍尔电流传感器。
如何选择行星减速机
1.在选择行星减速机时,首先要确定减速比。
2.确定减速比后,请将您选用的伺服电机额定扭矩乘上减速比,得到的数值原则上要小于产品型录上的相近减速机的额定输出扭矩,同时还要考虑其驱动电机的过载能力及实际中所需工作扭矩。所需工作扭矩要小于额定输出扭矩的2倍。满足上面条件后请选择体积的减速,体积小的减速机成本相对低一些。
3.接下来要考虑行星减速机的回程间隙。回程间隙越小其精度越高,成本也越高。用户要选择满足其精度要求系列的减速机就可以。还要考虑横向/径向受力和平均寿命。横向/径向受力大的减速机在和使用中可靠性高,不易出问题。通常其平均寿命远超过所配伺服电机的寿命。
4. 您还要考虑所配电机的重量。一种减速机只允许与小于一定重量的电机配套,电机太重,长时间运转会损坏减速机的输入法兰。
三 K5-19低惯量行星减速器
为了实现上述目的所采取的设计方案是:将压敏电阻和陶瓷气体放电管的单相并联式抗雷击浪涌电路应用到仪表的电源上。主要分为防雷电路部分和关电源电路部分,电路简单,采用复合式对称电路,共模、差摸全保护,可以不分L、N端连接。使压敏电阻RV1位于贴片整流模块前端分别与电源L、N并联,主要来钳位L、N线间电压,压敏电阻RV、RV2与陶瓷气体放电管FD1串联后接地,RV与FD1串联主要是泄放L线上感应雷击浪涌电流,RV2与FD1串联主要是泄放由信号口串人24V参考电位上的能量,RV、RV2短路失效后,FD1可将其与电源电路分离,不会导致失火现象。
上一篇:上海718SUPREME注重质量
下一篇:浙江7075美铝服务小中大型企业
行业信息