南昌零售新机电步进式VB060-L1-010-S1-P1浙江双级减速机扭矩
发布时间:2023-06-09 03:27:49
发布用户:ymcdkj
1-P1浙江双级减速机扭矩
或者速度回传改变以encoder变化为参考,使信号分辨率增加以期得到更佳的控制。电机能够运转顺畅而且响应良好,P.I.D.控制的恰当与否也无法忽视。之前提到直流无刷电机是闭回路控制,因此回授信号就等于是告诉控制部现在电机转速距离目标速度还差多少,这就是误差(Error)。知道了误差自然就要补偿,方式有传统的工程控制如P.I.D.控制。但控制的状态及环境其实是复杂多变的,若要控制的坚固耐用则要考虑的因素恐怕不是传统的工程控制能完全掌握,所以模糊控制、 系统及神经网络也将被纳入成为智能型P.I.D.控制的重要理论。
南昌零新机电:步进式VB060-L1-010-S1-P1浙江双级减速机扭矩
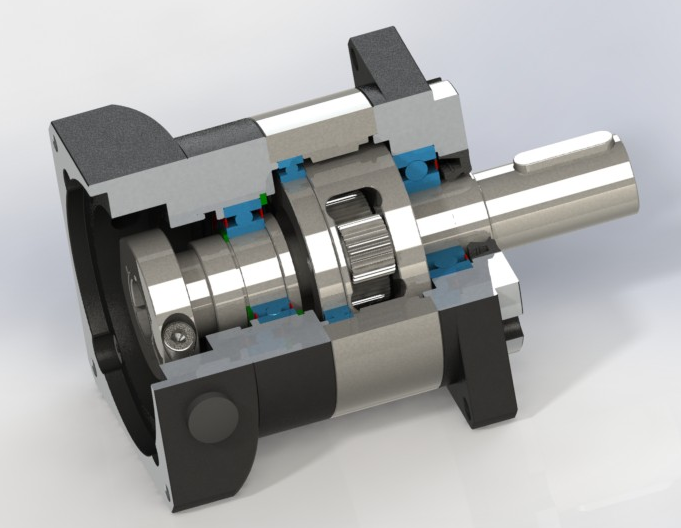
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此种组合为降速传动,传动比一般为1.25~1.67,转向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种组 向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。
3.现代交流伺服系统,在经历了从模拟到数字化的转变后,其内部数字控制环已经无处不在,比如换相、电流、速度和位置控制等;其实现主要通过新型功率半导体器件,像高性能DSP加FPGA、甚至伺服专用模块也不足为奇。且新的功率器件或模块每2~2.5年就会更新一次,新的软件算法也日新月异,厂商的伺服产品大概每5年亦会更新换代——总而言之,产品生命周期越来越短,变化越来越快。总结伺服厂家的技术路线和产品路线,结合市场需求的变化,可以看到以下一些伺服电机系统的发展趋势:
率化
尽管化一直都是伺服系统重要的发展课题,但是仍需要继续加强。主要包括电机本身的率:比如永磁材料性能的和更好的磁铁结构设计;也包括驱动系统的率化:包括逆变器驱动电路的优化,加减速运动的优化,再生制动和能量反馈以及更好的冷却方式等。
一般要考虑以下方面作检查: 1) 电机力矩是否足够大,能否带动负载,因此我们一般用户选型时要选用力矩比实际需要大 50%~ 的电机,因为步进电机不能过负载运行,哪怕是瞬间,都会造成失步,严重时停转或不规则原地反复动。 2) 上位控制器来的输入走步脉冲的电流是否够大(一般要 >10mA ),以使光耦稳定导通,输入的频率是否过高,导致接收不到,如果上位控制器的输出电路是 CMOS 电路,则也要选用 CMOS 输入型的驱动器。 3) 启动频率是否太高,在启动程序上是否设置了加速过程,从电机规定的启动频率内始加速到设定频率,哪怕加速时间很短,否则可能就不稳定,甚至处于惰态。 4) 电机未固定好时,有时会出现此状况,则属于正常。因为,实际上此时造成了电机的强烈共振而导致进入失步状态。电机必须固定好。 5) 对于 5 相电机来说,相位接错,电机也不能工作。
S1-P1浙江双级减速机扭矩
气动三联件主要由气压表、过滤器、油雾器、调压器等部分组成,其中过滤器中内置滤芯,在使用一段时间后要进行维护清洗、定期更换;这样的压缩空气不进行任何,直接进入气动马达,则将导致马达寿命大大缩短,从而致使整把工具动力输出不足、且不稳定,易造成马达等零部件连环损坏的现象,为此在由管道输送的压缩空气至气动工具之间,必须设置压缩空气过滤、调节装置,包括各类气动套筒、接杆、转换接头、头等;上述各部分相互依存、相互制约、不能单独孤立存在实现作业。